




About MotorXP
MotorXP is not just another electric motor design tool. MotorXP is more than 40 years of combined experience of our engineers in electromagnetics, electric machine design, power electronics, control design and EV industry. This is where theory and practice meet together, where new ideas create technologies of our future. Why we recommend MotorXP? Just because we use it to solve our everyday challenges creating state of the art electric motors and drives. Because electric is the future.
MotorXP-PM
Overview
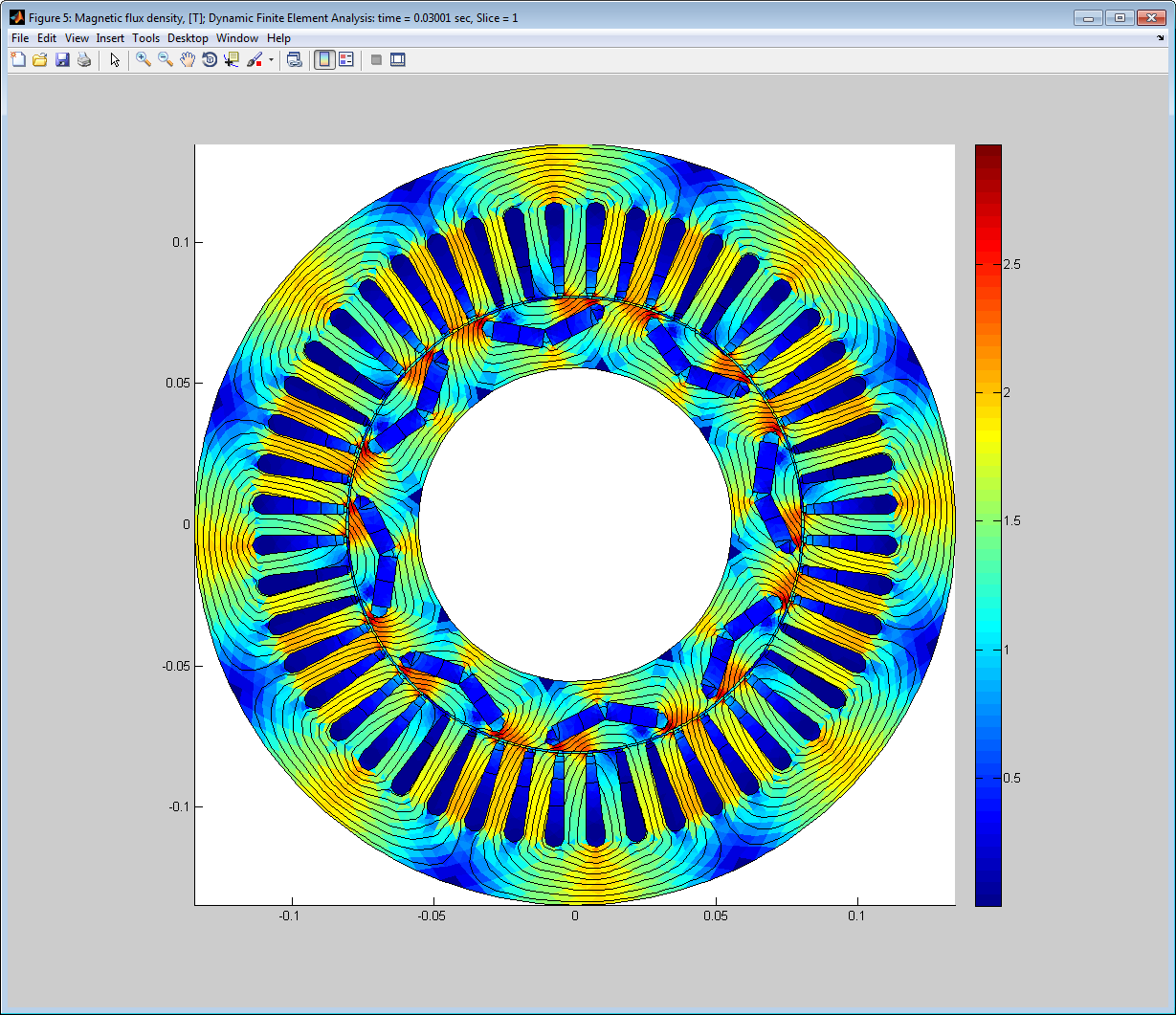
MotorXP-PM is a commercial version of MotorAnalysis-PM, a popular software for design and analysis of permanent magnet (PM) motors and generators. MotorXP-PM offers much more features and capabilities, please see the detailed comparison MotorXP-PM vs. MotorAnalysis-PM. MotorXP-PM supports different machine types including brushless DC (BLDC) motors and generators and permanent magnet synchronous motors (PMSM) and generators with surface-mounted or interior permanent magnets (IPM). MotorXP-PM combines both finite element analysis (FEA) and analytical analysis methods providing fast and accurate results, which establishes a complete set of tools for design and analysis of permanent magnet machines.
MotorXP-PM is available as a MALTAB-based application and as a standalone program working without MATLAB.
MotorXP-PM is available as a MALTAB-based application and as a standalone program working without MATLAB.
Analysis Methods
MotorXP-PM vs. MotorAnalysis-PM
MotorAnalysis-PM is a free version of MotorXP-PM with limited functionality. Please see below the full list of features:
Feature |
MotorXP-PM |
MotorAnalysis-PM |
| Stator geometry templates |  |
|
| Rotor geometry templates | |
 |
| Custom geometry templates | |
|
| Custom rotor and stator geometries imported from DXF file | |
|
| Geometry export into DXF file | |
|
| Automatic winding layout | All possible pole/slot combinations (balanced windings) | Integer slot windings only (integer number of slots per pole per phase) |
| Inverter losses calculation | |
|
| Magnet losses | |
|
| Retaining sleeve losses | |
|
| Iron losses | FEA and D-Q models | FEA models only |
| Demagnetization analysis | |
|
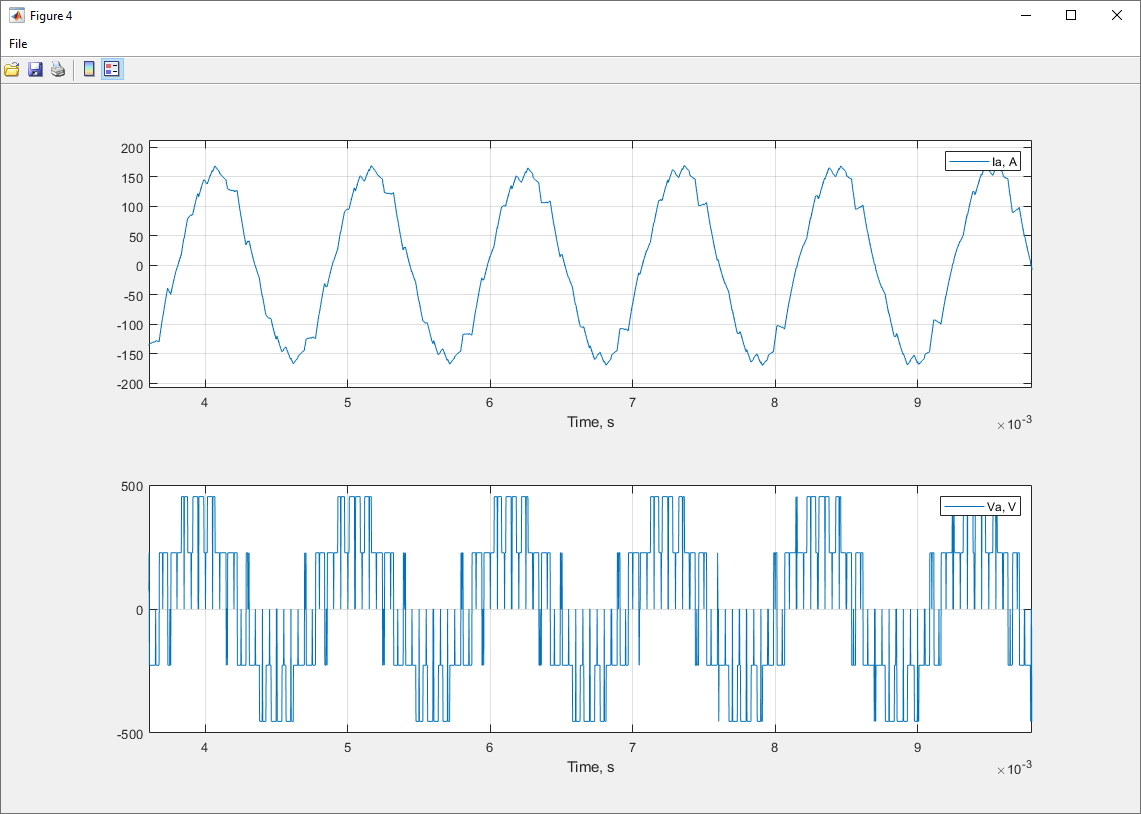
| Dynamic D-Q Analysis | PWM and six-step drives | PWM drives only |
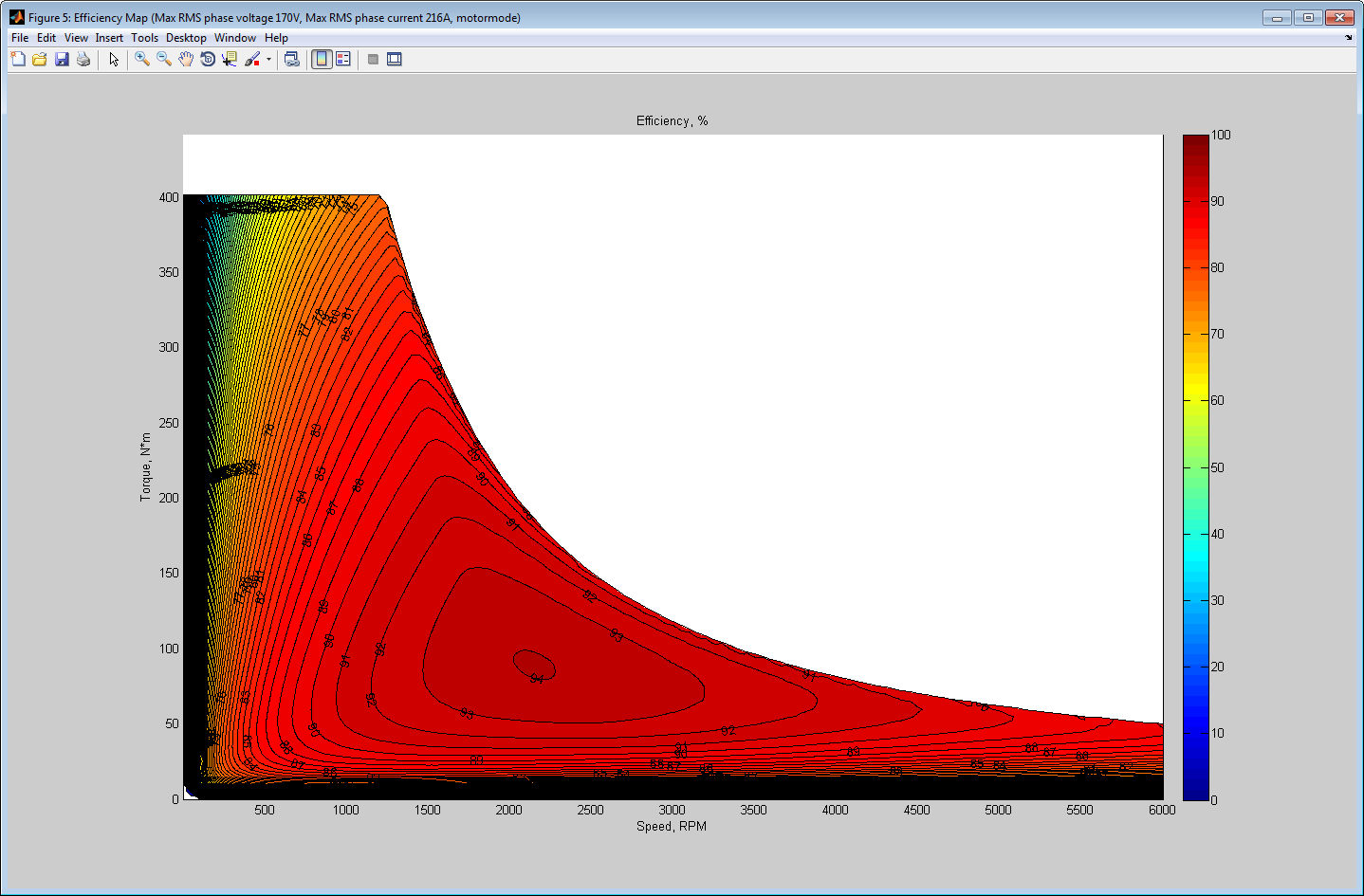
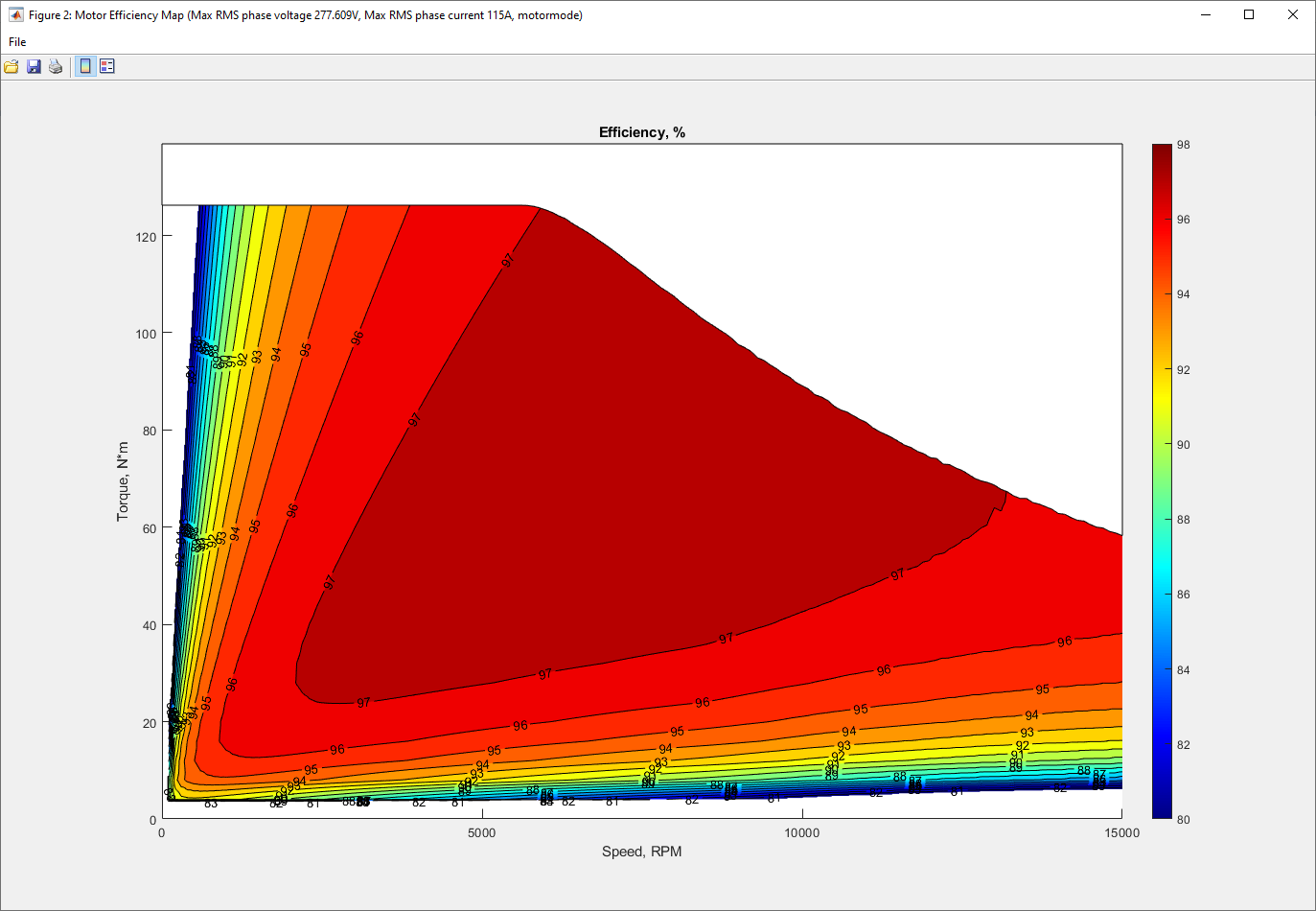
| Motor efficiency maps | |
Do not include iron losses |
| Inverter efficiency maps | |
|
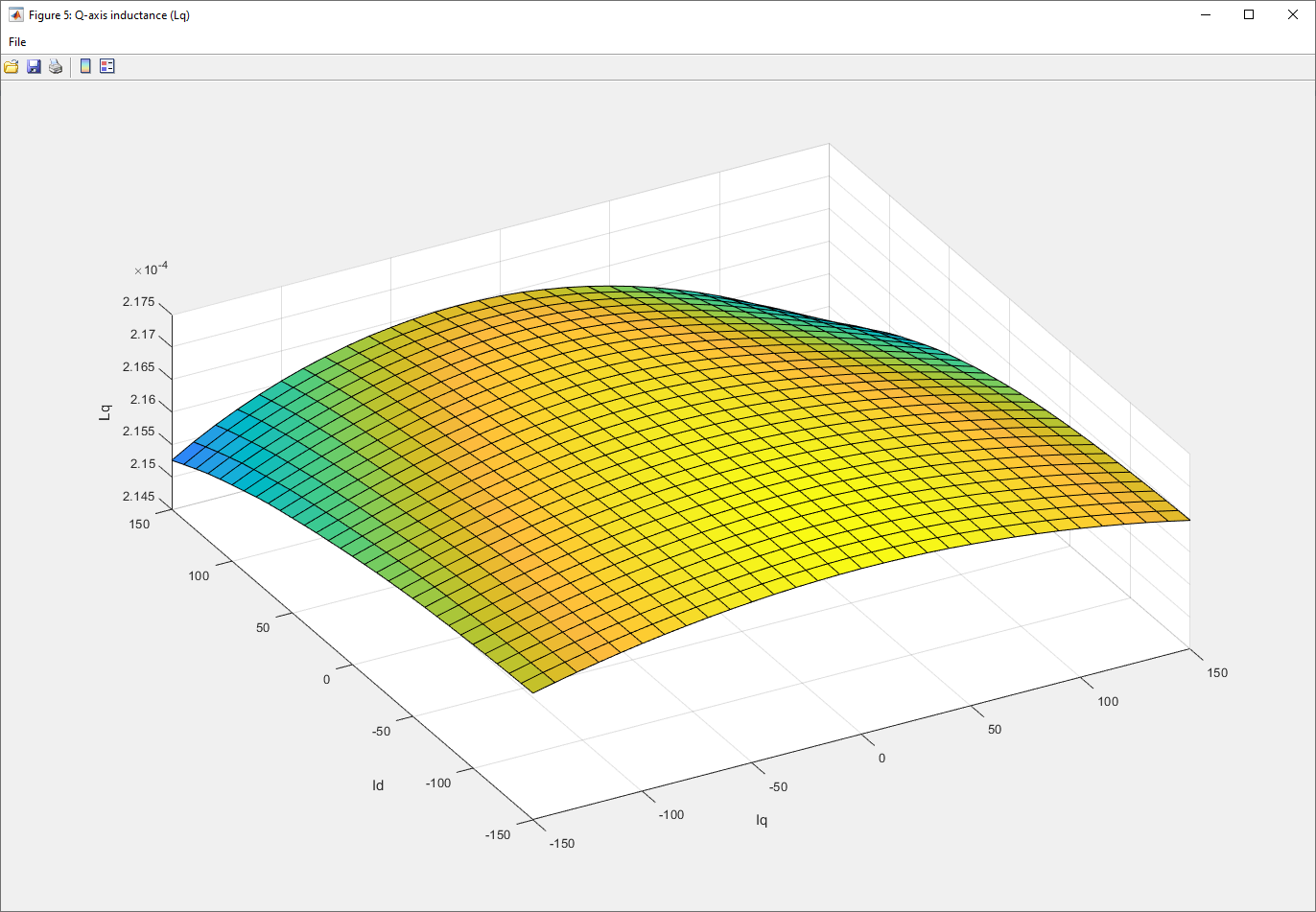
| Export of D-Q model parameters (Ld, Lq, magnet flux linkage) | |
|
| Export of max. efficiency operation Id / Iq lookup tables | |
|
| Machine constants | |
|
| Automatic calculation of flux density levels | |
|
| Project files with protected design data | |
|
MotorXP-AFM
Overview
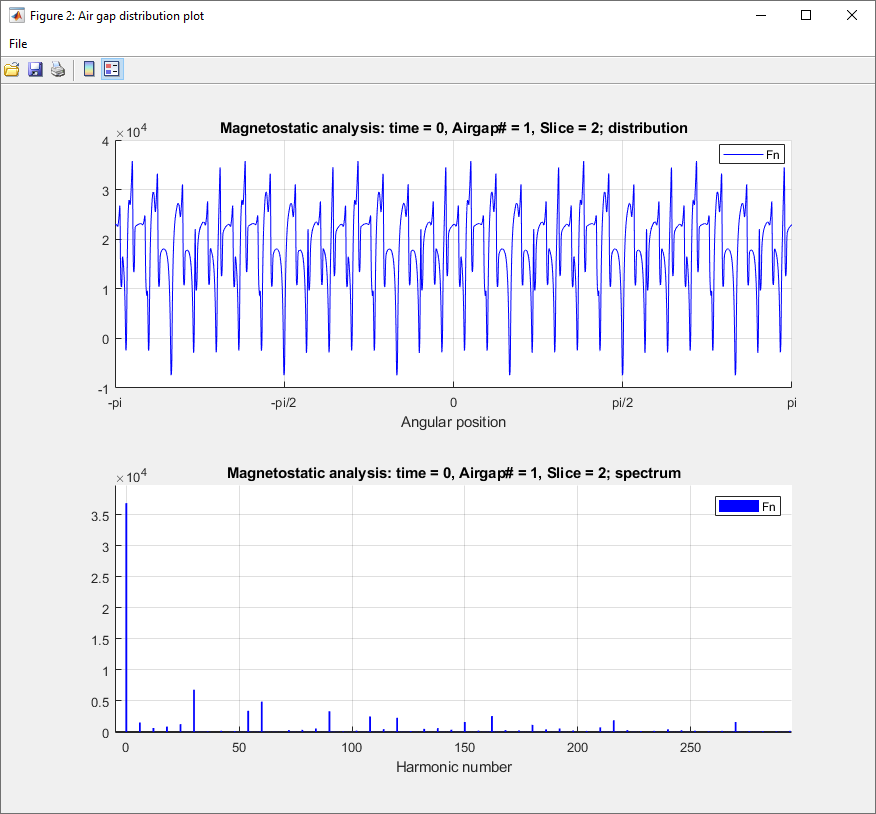
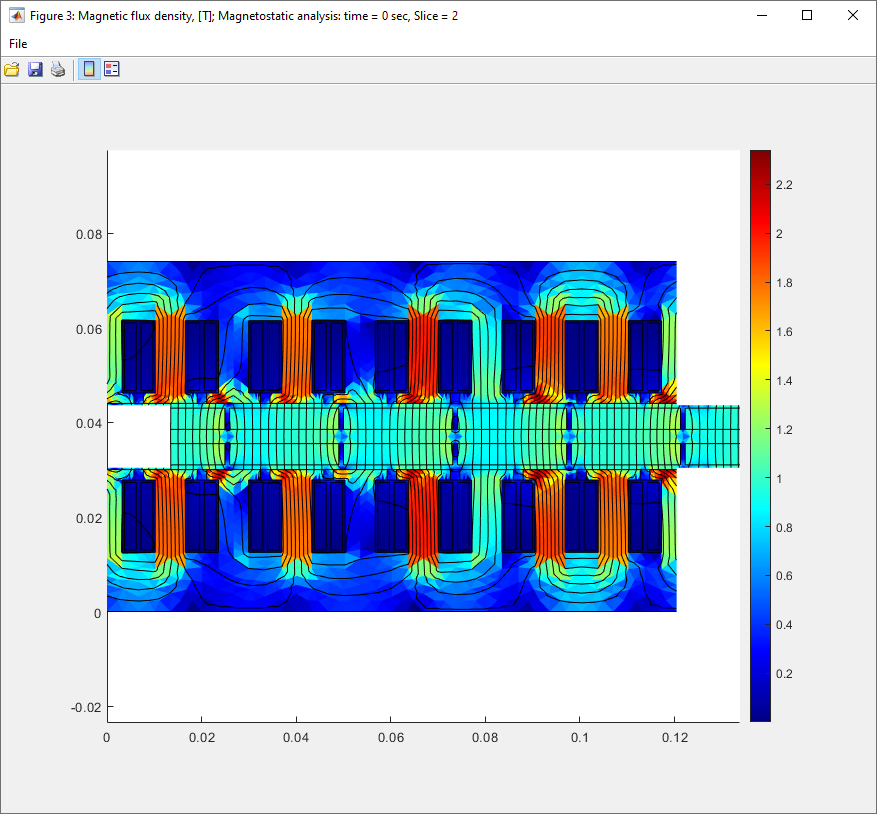
MotorXP-AFM is the only software currently available on the market fully dedicated to the electromagnetic design and analysis of axial flux machines (AFM) with permanent magnets, including brushless DC and permanent magnet synchronous motors and generators. Thanks to its unique quasi-3D finite element modelling approach it brings the AFM design to a completely new level offering x10s times faster computational speed compared to full 3-D FEA without compromising on accuracy. MotorXP-AFM includes several analysis types composed of a combination of FEA and analytical methods, more than hundred output parameters, built-in and custom geometry templates, customizable material library, parametric analysis and optimization API to establish a flexible and robust e-machine design workflow.
MotorXP-AFM is available as a MALTAB-based application and as a standalone program working without MATLAB.
MotorXP-AFM is available as a MALTAB-based application and as a standalone program working without MATLAB.
Analysis Methods
MotorXP-IM
We are working hard to get it done.